학력
학력무관
| 포지션 | WoRV 팀 Physical AI & Robotics 인재 상시 채용 (다수 직무) |
| 고용형태 | 정규직 |
| 근무지 | 경기 수정구 |
| 급여 | 회사 내규에 따름 |
[마음에이아이] WoRV 팀 Physical AI & Robotics 인재 상시 채용 (다수 직무)
[모집기간]
상시채용
[모집분야]
-Applied AI Engineer
-Robotics & Vehicle Control Engineer
-Data Pipeline Manager
-Simulation Designer
-Simulation Engineer
-Research Scientist / Fellow
-Project Manager
[담당업무]
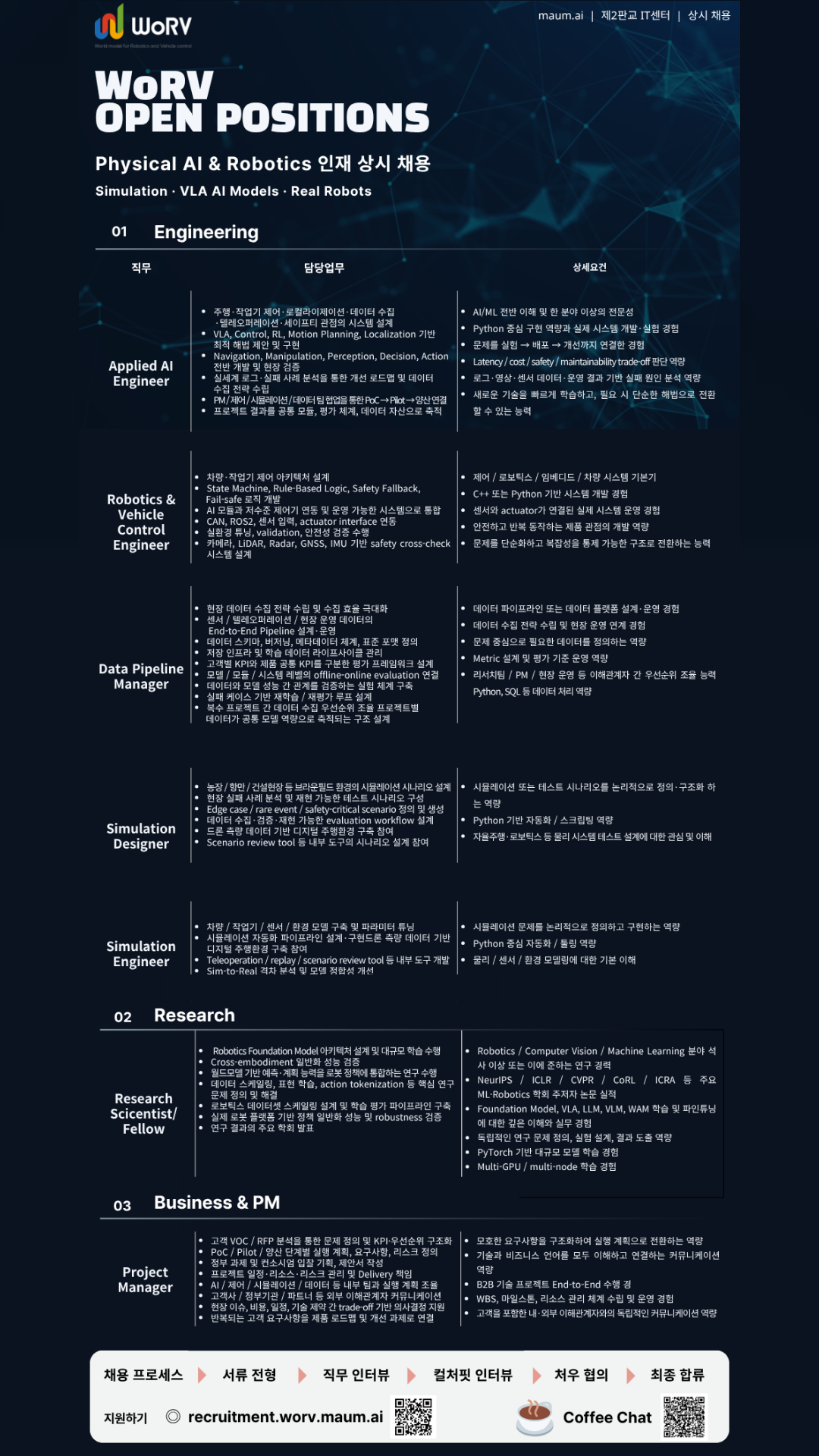
WoRV(World model for Robotics and Vehicle control)는 maum.ai의 Physical AI & Robotics 조직으로, Simulation · VLA AI Models · Real Robots을 한 축으로 묶어 자율주행/자율작업 제품을 만들고 있습니다.아래 직무에 대해 상시 채용을 진행합니다.
(Engineering)
1) Applied AI Engineer
- 주행·작업기 제어, 로컬라이제이션, 데이터 수집, 텔레오퍼레이션,세이프티 관점의 시스템 설계
- VLA, Control, RL, Motion Planning, Localization 기반 최적 해법 제안 및 구현
- Navigation / Manipulation / Perception / Decision / Action 전반 개발 및 현장 검증
- 실세계 로그·실패 사례 분석을 통한 개선 로드맵 및 데이터 수집 전략 수립
- PM/제어/시뮬레이션/데이터팀 협업을 통한 PoC → Pilot → 양산 연결
- 프로젝트 결과를 공통 모듈, 평가 체계, 데이터 자산으로 축적
2) Robotics & Vehicle Control Engineer
- 차량·작업기 제어 아키텍처 설계
- State Machine, Rule-Based Logic, Safety Fallback, Fail-safe 로직 개발
- AI 모듈과 저수준 제어기 연동 및 운영 가능한 시스템으로 통합
- CAN, ROS2, 센서 입력, actuator interface 연동
- 실환경 튜닝, validation, 안전성 검증
- 카메라/LiDAR/Radar/GNSS/IMU 기반 safety cross-check 시스템 설계
3) Data Pipeline Manager
- 현장 데이터 수집 전략 수립 및 수집 효율 극대화
- 센서/텔레오퍼레이션/현장 운영 데이터의 End-to-End Pipeline 설계·운영
- 데이터 스키마, 버저닝, 메타데이터 체계, 표준 포맷 정의
- 저장 인프라 및 학습 데이터 라이프사이클 관리
- 고객별 KPI와 제품 공통 KPI를 구분한 평가 프레임워크 설계
- 모델/모듈/시스템 레벨의 offline-online evaluation 연결
- 데이터와 모델 성능 간 관계를 검증하는 실험 체계 구축
- 실패 케이스 기반 재학습/재평가 루프 설계
- 복수 프로젝트 간 데이터 수집 우선순위 조율 및 공통 모델 역량으로 축적되는 구조 설계
4) Simulation Designer
- 농장/항만/건설현장 등 브라운필드 환경의 시뮬레이션 시나리오 설계
- 현장 실패 사례 분석 및 재현 가능한 테스트 시나리오 구성
- Edge case / rare event / safety-critical scenario 정의 및 생성
- 데이터 수집·검증·재현 가능한 evaluation workflow 설계
- 드론 측량 데이터 기반 디지털 주행환경 구축 참여
- Scenario review tool 등 내부 도구의 시나리오 설계 참여
5) Simulation Engineer
- 차량/작업기/센서/환경 모델 구축 및 파라미터 튜닝
- 시뮬레이션 자동화 파이프라인 설계·구현
- 드론 측량 데이터 기반 디지털 주행환경 구축 참여
- Teleoperation / replay / scenario review tool 등 내부 도구 개발
- Sim-to-Real 격차 분석 및 모델 정합성 개선
(Research)
6) Research Scientist / Fellow
- Robotics Foundation Model 아키텍처 설계 및 대규모 학습 수행
- Cross-embodiment 일반화 성능 검증
- 월드모델 기반 예측·계획 능력을 로봇 정책에 통합하는 연구
- 데이터 스케일링, 표현 학습, action tokenization 등 핵심 연구 문제 정의 및 해결
- 로보틱스 데이터셋의 스케일링 설계 및 학습 평가 파이프라인 구축
- 실제 로봇 플랫폼 기반 정책 일반화 성능 및 robustness 검증
- 연구 결과의 주요 학회 발표
(Business & PM)
7) Project Manager
- 고객 VOC / RFP 분석을 통한 문제 정의 및 KPI·우선순위 구조화
- PoC / Pilot / 양산 단계별 실행 계획, 요구사항, 리스크 정의
- 정부 과제 및 컨소시엄 입찰 기획, 제안서 작성
- 프로젝트 일정·리소스·리스크 관리 및 Delivery 책임
- AI/제어/시뮬레이션/데이터 등 내부 팀과 실행 계획 조율
- 고객사/정부기관/파트너 등 외부 이해관계자 커뮤니케이션
- 현장 이슈, 비용, 일정, 기술 제약 간 trade-off 기반 의사결정 지원
- 반복되는 고객 요구사항을 제품 로드맵 및 개선 과제로 연결
[우대사항]
- AI / Robotics / 자율주행 / 자율작업기 분야 실무 또는 연구 경험
- VLA, World Model, Foundation Model, LLM/VLM 관련 학습·파인튜닝 경험
- 실로봇/실차량 데이터 운영 또는 Sim-to-Real 갭 분석 경험
- NeurIPS, ICLR, CVPR, CoRL, ICRA 등 주요 ML/Robotics 학회 논문 실적
- ROS2 / CAN / 임베디드 시스템 / 센서(LiDAR·Radar·Camera·IMU) 운영 경험
- B2B 기술 프로젝트를 End-to-End로 수행해본 경험
- 오픈소스 기여 경험
- 영어 커뮤니케이션 가능자
[채용공고]